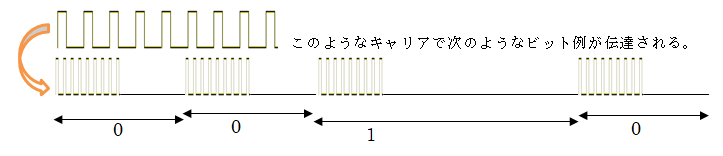
「サブキャリア: fsc = 38kHz, 1/3duty」は、タイマ割込み内で、D4、D5の赤外線LEDのON/OFFすることで作ります。
そこで、約38KHz周期/3のdtの周期を目標にしてタイマーを使うことにします。
この周期でリモコンの赤外線の受信情報を記憶し、この周期で再生するプログラムにするわけです。
上記波形のキャリア有りや無しに変化するまでの期間を、この周期のカウント値で記憶します。
dtを 1/38KHz/3 とすると、サブキャリアの変調は、
『dt秒の間ONした後、(dt*2)u秒の間OFFする』を繰り返すことで
赤外線LEDのキャリアを作ります。(発光の点滅です)
(この1/3dutyの点滅幅比率は、各フォーマット共通のようです)
このクロックは、Timer4で次のように作ります。
周辺モジュール用クロックが 40e6Hzなので、
T4CONbits.TCKPS = 0;// タイマ入力クロック0~7 [1:1]プリスケール値(b6-b4)にして、
PR4=351にすると、約38KHz周期/3のdtが得られます。
これは「(1/38e3/3)/(1/40e6)=350.8771929824562より算出した値です」
このPR4=351の場合、Timer4の割込みは (1/40e6*351) = 8.775e-06 秒間隔になります。
受信ではこの間隔でサブキャリアが存在するタイミングを記録し、
送信ではこの間隔でサブキャリアが存在するタイミング中のON/OFF制御でキャリアの波形を生成します。
このTimer4の割込み初期化は次のようになります。
void init_timer4() //割り込みの初期化もカスタマイズする関数
{
T4CON =0x00000000;//typeB,16bit, [1:1]プリスケール
TMR4=0x00000000; //16bitタイマの設定値(レジスタがカウントアップ)
PR4=351; // 8.775e-06秒間隔の割込み(1/38e3/3)
IPC4bits.T4IP = 6; // Set priority level = 6(2番に大きな優先度)
IPC4bits.T4IS = 0;// Set sub-priority level = 3(最大値)
IFS0bits.T4IF = 0;// Clear the timer interrupt status flag
IEC0bits.T4IE = 1;// Timer4 Enable(割込み許可).
}
グローバル的な変数 frame_status の状態で、タイマ割込み関数( timer4() )内で、
受信の記録処理「rec_infrared() 」かまたは、記録より赤外線の再生送信処理「snd_infrared()」の分岐を行います。
リモコン受信でタイミングを記憶する(rec_infrared())
この中で、リモコンからの受光で、そのパターンを学習するわけですが、
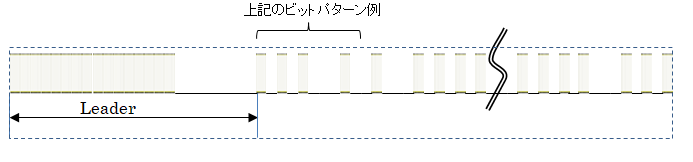
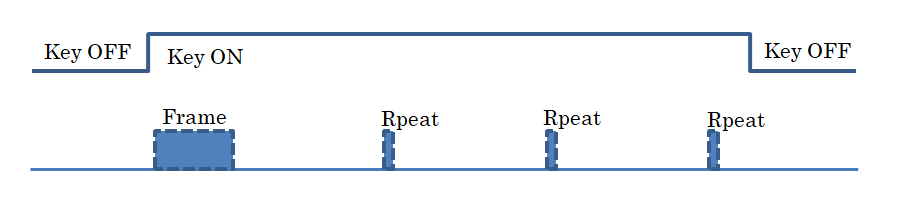
それは、上記で示した 「Key ON」してから「Key OFF」までの
「frame」を含めたキャリアの変化を記憶します。
具体的には、まず「frame」内の先頭にある「Leader」を検出して、記憶を開始します。
受光ICの出力がLowであればキャリアありと判断しますが、
「Leader」の判定は、ある一定時間(FRAME_START_COUNT_VALのカウント値)のLowが存在していたらそうであると判断するだけです。
そして
「Leader」のLowとHiを含め、ある一定時間のキャリアが無いHiが続く(FRAME_END_COUNT_VALのカウント値)と
判断されるまでのLowとHiの変化に達する割込み回数を記録します。
この記録値は、割込みごとでカウントするtiming_counterの情報です。
このカウントの記録は、プログラムのロードで初期化されない領域の _MEMO3[3] から記憶順次に_MEMO3[0x0EFF]までに記憶します。
なお、一つのキー操作で記憶した、_MEMO3配列への記憶数を、_MEMO3[0]に記録します。
_MEMO3配列はbyte要素で、この一つのカウント値の記憶を、サイズに応じて複数の要素を使って記憶する次の技法を使います。
・一つの要素に記憶できるデータを0~127に制限し、最上位bitには特別な次の意味を持たせる。
・最上位bitが1であれば、その上位7ビットが次の要素に続くと決めて使う。
0であればその要素の7ビットが最上位で次に続く要素がない。
これによって、記憶域を効率的使えます。0から127であれば1byte要素に記憶でき、2byteの連続要素であれば、27×27=16383、
3byteの連続要素であれば、27×27×27=2097152まで記憶できます。
この方法であれば257を記憶する場合、[0x81],[0x02]と連続要素に記憶されます。
[0x81]の最上位ビットが1なので、次の連続要素も使って記憶していることになり、[0x0200>>2]+[0x01]=[0x0101]を意味します。
以上を実現するために、_MEMO3への格納関数「store()」、_MEMOデータの参照関数「restore()」を定義しました。
これを使う割込み内から呼び出される受信関数「rec_infrared() 」と受信関連のグローバル変数を以下に示します。
#include <xc.h>
#include "common.h"
int frame_status = 0;
//0:startを待つ, 1:frame受信中(end判定も行う), 2: 送信準備完了, 3:送信, 4:Error.
int FRAME_START_COUNT_VAL = 273;//startの判定に必要な1この期間に相当するカウント値 .
int FRAME_END_COUNT_VAL = 14814;//endの判定に必要な0この期間に相当するカウント値 (約0.13秒) .
int idx_rec=3;//受信のタイミング記憶位置(最初のキャリアありの記録位置).
int rb5_on = 0; // キャリアありで1、キャリア無しで0
int prev_rb5_on=0;// 上記の変化を、割込み時の状態を記憶する(前の状態).
int timing_counter= 0;
// _MEMO3 のidx位置へ、dataを可変長サイズで記憶し、次の記憶用インデックスを返す.
int store(int idx, int data)
{
for(;;) {
_MEMO3[idx++] = data;//カウント値の記録.
data >>= 7;
if(data != 0) _MEMO3[idx-1] |= 0x80;//次の記憶がある?
else return idx;
}
}
// _MEMO3 のidx位置にある可変長データを*dataに記憶し、次の記憶用インデックスを返す.
int restore(int idx, int *data)
{
*data = 0;
int shift7 = 0;
for(;;){
int temp = _MEMO3[idx++];
*data += (temp & 0x7f) << shift7;
if( (temp & 0x080) == 0 ) return idx;
shift7 += 7;
}
}
void rec_infrared() // 赤外線受信 (_PTR_RAM_AREA3+3 番地から、タイミングを記憶)
{
if( idx_rec >= 0x0F00) {// 予想記憶域を超えた場合のエラー
_debug_hex4(15,15,1);
frame_status = 4;
return;
}
prev_rb5_on = rb5_on;
rb5_on = (PORTB & 0x80) == 0; // キャリアありで 1を記憶.
if( frame_status == 0 ) { // startを待つ状態.
if( rb5_on == 0) {
timing_counter= 0;
return;// フレーム開始タイミングカウンタクリア.
}
timing_counter++;
if( timing_counter >= FRAME_START_COUNT_VAL ){
// フレーム開始とされる期間のLowが続いた?.
frame_status = 1; // frame受信始まりと判断.
//_debug_hex4(1,1,1);
}
} else if( frame_status == 1 ){ // frameの受信中 end check.
timing_counter++;
if( prev_rb5_on == 0 && timing_counter >= FRAME_END_COUNT_VAL ){//フレーム終了のチェック.
idx_rec=store(idx_rec,timing_counter);//カウント値の記録.
store(0,idx_rec);//記録数の設定
frame_status = 2; //送信準備完了
_RB15 = 1; // LED D1(黄緑)をON:受信が終わったことを視覚的に知らせる。.
rb5_on = prev_rb5_on=0;
//_debug_hex4(2,2,1);
}
if( rb5_on == 0 && prev_rb5_on != rb5_on ) {// 立下りを待つ.
idx_rec=store(idx_rec,timing_counter);//カウント値の記録.
timing_counter= 0;
return;
} else if( rb5_on == 1 && prev_rb5_on != rb5_on ) {// 立ち上がりを待つ.
idx_rec=store(idx_rec,timing_counter);//カウント値の記録.
timing_counter= 0;
return;
}
}
}
frame_status = 0で始まり、Frame先頭の「Leader」を検出して、056行で1に変わることで、キャリアの記憶モードに変わります。
最初の記憶は、070行で、これが「Leader」のキャリアの長さになります。(_MEMO3[3]~に「Leader」の長さが記憶)
次の記憶はキャリア無しの長さで、_MEMO3[idx_rec]~に記憶され、
次はキャリアあり長さが_MEMO3[idx_rec]~と・・・交互に記憶される繰り返しです。
(idx_recは、store(idx_rec,timing_counter)で更新され、記憶するtiming_counterの大きさで次のidx_recが決まります。)
この繰り返しは、キャリア無しのカウント値がFRAME_END_COUNT_VALに達するまで続きます。
この長さだけキャリア無しが続くと判断された064行で、frame_status = 2が設定されて、受信処理は終わります。
以下に。この関数を示します。
記憶したリモコンパターンを送信する「snd_infrared() 」
送信時は、frame_status = 2で、上記Timer4割込みでsnd_infrared()を呼ぶことで行います。
_RB5 = 0; の赤外線LEDをOFFの状態から始まり、infrared_flagが1でキャリアあり、
0がキャリアなしで、timing_counter が0タイミングで交互に切り替わります。
infrared_flagが1でキャリアあり状態であれば、 『_RB5 = 1を1回、_RB5 = 0を2回]』行うように制御してキャリアを作ります。
以下に。この関数と残りのコードを示します。
int idx_snd=1;//送信のタイミング記憶位置 .
int infrared_flag = 0; // 赤外線LEDのキャリアON状態で1.
int timing_counter_t=0; // タイミングが変わる目標のタイミング.
void snd_infrared() // 赤外線送信.
{
static int count = 0;
if( idx_snd >= idx_rec ){// 送信終了?.
frame_status = 2;
return;
}
if( timing_counter == 0 ){
infrared_flag = ! infrared_flag;//キャリア反転.
count = 0;
}
if( infrared_flag != 0 && count == 0 ){
_RB5 = 1; // 赤外線LED点灯.
__asm__ ("NOP");
} else {
_RB5 = 0;
__asm__ ("NOP");
}
if(++count == 3) count = 0;// キャリア 1/3 duty生成.
if(++timing_counter >= timing_counter_t){
timing_counter = 0;
idx_snd = restore(idx_snd, & timing_counter_t);//次のタイミング取得.
//_send_decimal( timing_counter_t,8);
//_send_decimal( idx_snd,8);
//_send_string("<-- timing_counter_t, idx_snd\r\n");
}
}
void timer4() //割り込み関数.
{
static int print_flag = 0;
if( frame_status < 2){
print_flag = 1;
rec_infrared();//受信処理.
return;
} else if( frame_status == 3 ){
print_flag = 1;
snd_infrared();//送信処理.
return;
}
//static int count=0;//デバック確認用
//if(count++ % 100000 != 0) return;
if( print_flag == 0) return;
int size = _get_capacity();
if( size < 10) return; //残りの出力バッファブロックが10未満なら出力しない。 .
if( _request_acc_outbuff(_ID_ACCESS_T4_TASK) == 0 ) return;
_send_decimal(frame_status ,8);
_send_string("<--frame_status \r\n");
_send_decimal( idx_rec,8);
_send_string("<-- idx_rec\r\n");
int tc=0;
int idx= restore(3, & tc);
_send_decimal( tc ,8);
_send_string("<-- Leader\r\n");
idx= restore(idx, & tc);
_send_decimal( tc ,8);
_send_string("<-- T0\r\n");
idx= restore(idx, & tc);
_send_decimal( tc ,8);
_send_string("<-- T1\r\n");
_release_acc_outbuff(_ID_ACCESS_T4_TASK);
print_flag = 0;
}
__attribute__((address( 0x80005000 ))) void start (void);
void start()
{
_send_string("START\r\n");
if(frame_status == 2){// 既に受信が終わっている? .
frame_status = 3;// 送信
timing_counter= 0;
infrared_flag = 0; // 初期はキャリア無し(timing_counter==0時に反転).
//最初のキャリアありのタイミング長を取得 .
idx_snd = restore(3, &timing_counter_t);
_send_decimal( timing_counter_t,8);
_send_decimal( idx_snd,8);
_send_string("<-- timing_counter_t, idx_snd\r\n");
return;
}
prev_rb5_on=0;//RB5の初期化
_RB5 = 0; // 赤外線LEDをOFF
__asm__ ("NOP");
_HANDLES[_IDX_INIT_TIMER_4_5] = init_timer4;// 割り込み初期化関数のデフォルトを変更 .
_HANDLES[_IDX_TIMER_4_FUNC] = timer4;// 割り込み関数のデフォルトを変更登録 .
init_timer4();
T4CONbits.ON = 1;// Start timer4
_RB15 = 0; // LED D1(黄緑)をOFF
}
プログラムロード時は、frame_status が0になっており、start()の実行でリモコン受信状態になります。
ここで、赤外線リモコンを受光部に向けて「テレビON」操作すると、受光信号のパターンを記憶して、frame_status が2になり、
次のような応答メッセージを出します。
(これは、Panasonic ブルーレイディスクレコーダー用リモコン N2QAYB000912での電源ON操作)
START:80005000
START
+2<--frame_status
+241<-- idx_rec
+396<-- Leader
+203<-- T0
+46<-- T1
この表示後の状態は、タイマ割込みでtimer4()を繰り返し実行中の状態ですが、
frame_status が2で、print_flagが0であるため、なにもしないことを繰り返しいている状態です。
ここで再びUSB通信で「START:80005000」よりstart()を実行をスタートさせると、
下記メッセージを出して、記憶したリモコンのパターンで発光します。
パターン発光が終わると再びframe_statusを2にして、なにもしない割込みループに戻ります。
START:80005000
START
+397 +5<-- timing_counter_t, idx_snd
+2<--frame_status
+241<-- idx_rec
+396<-- Leader
+203<-- T0
+46<-- T1
start()を実行をスタートさせると、その都度に記憶したリモコンのパターンで発光します。
赤外線LEDをテレビ赤外線受光部に向けて実行して、「テレビのON動作」を確認できました。
なお、東芝のエアコンのリモコン動作も確認しましたが、全を試している訳ではないので、
正しく記憶できないパターンや、送信で動作しないパターンがあるかもしれません。